Défi 5 : Ajouter des capteurs
Vous n’avez pas encore un robot, car il n’a pas encore de capteurs, il ne peut donc pas interagir avec son environnement (une des conditions pour que ce soit un robot). Nous allons installer et programmer quelques capteurs pour réaliser ces tâches.
Présentation des capteurs de l’ensemble NXT :
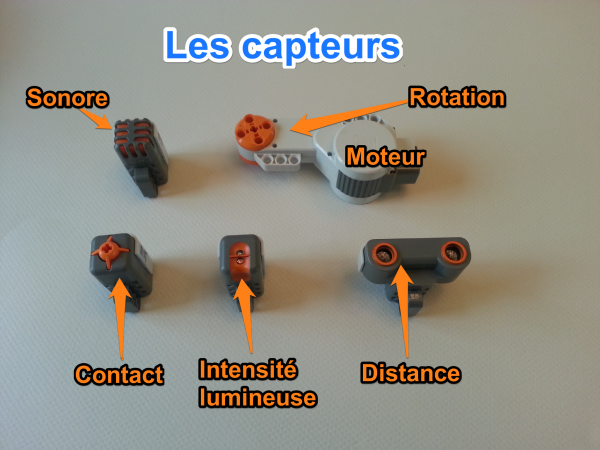
Les capteurs pour l’ensemble EV3

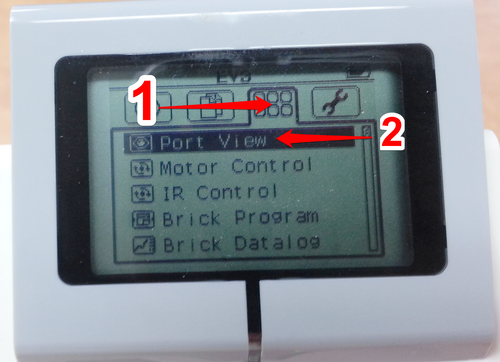
Pour EV3, on navigue à l’aide des boutons sur la brique vers le menu 1 puis 2 de l’image ci-dessous :
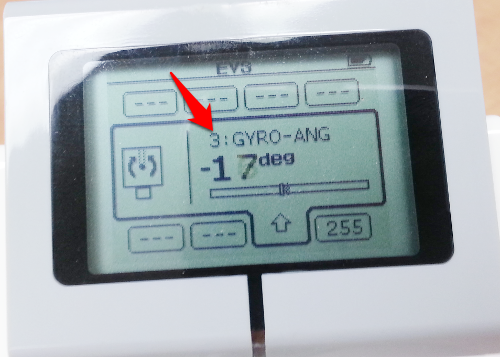
Ensuite on peut choisir le port désiré pour voir les mesures (exemple du capteur gyroscope dans le port 3 ci-dessous) :
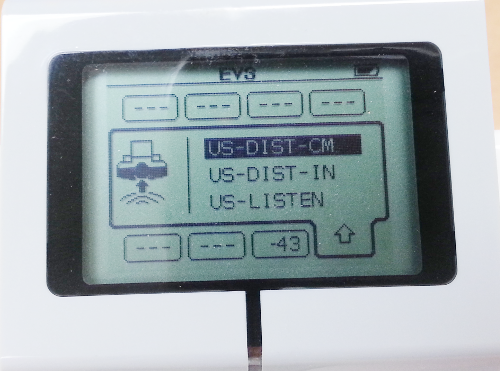
On peut cliquer sur le bouton de commande central pour pouvoir sélectionner d’autres options (exemple du port 4 avec le capteur ultrason où on peut sélectionner les cm ou autres) :
Vous pouvez essayer de faire démarrer votre robot lors d’un son intense, ou de l’arrêter à différents moments : lorsqu’il rencontre une ligne sur le sol, à une distance (capteur de distance, attention aux fils devant le radar, ils peuvent interférer) de 30 cm d’un obstacle, lorsque le robot touche un obstacle.