5) Assemblage mécanique
Progression
L'assemblage mécanique du Qbot peut se faire à plusieurs moments lors de la fabrication du Qbot. Nous essayerons d'expliquer clairement à quel moment chaque étape peut être faite. Lors de l'assemblage, il est utile de consulter la liste du matériel, l'équipement nécessaire et la visualisation du Qbot.
À partir de l'étape 6, le Qbot est suffisamment complet pour amorcer sa programmation. Cependant, il faudra revenir à l'assemblage mécanique du Qbot au fur et à mesure que vous avancez dans les défis de programmation. Voir l'étape 6 pour plus d'informations.
Pour les étapes 8 à 12, ce sont les différents capteurs du robot qui sont fixés. Ces capteurs seront utilisés lors des défis de programmation. Comme tous les capteurs ne sont pas nécessaires pour chaque défi, nous indiquerons quels défis deviennent réalisables après chaque étape d'assemblage. Consultez le schéma de branchement et l'étape 13 des branchements pour la connexion des capteurs.
Assemblage mécanique
- Tarauder le châssis pour la fixation de la roue arrière avec le boulon à l'aide du taraud 3/8" (voir la liste de l'équipement nécessaire)
À faire avant les branchements! Si le contrôleur de moteur est collé sur le châssis avant le taraudage, on peut simplement le décoller avec un pistolet décape tout (heat gun) tenu loin du châssis pour réchauffer la colle sans faire fondre le plastique.
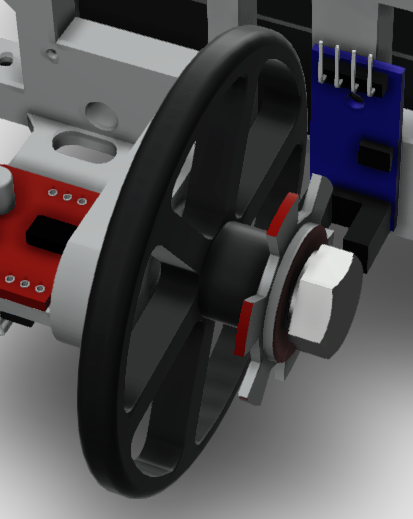
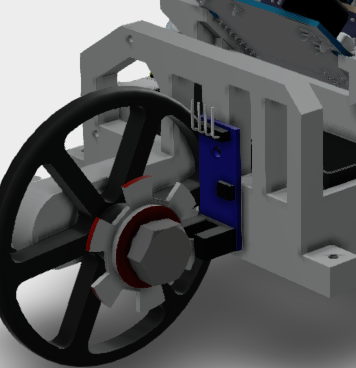
Fixer le disque-encodeur sur la roue arrière par compression (avec un étau par exemple). S'assurer que l'ensemble des deux pièces peut tourner librement autour du boulon 3/8''. Sinon, agrandir le trou avec une mèche de même diamètre.
Boulonner ensemble la roue arrière et le disque-encodeur sur le châssis avec le boulon ⅜”.
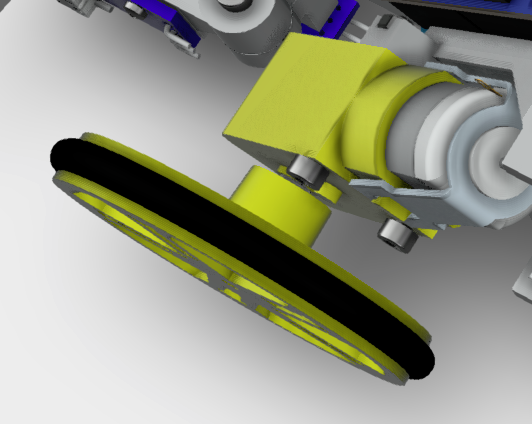
Utiliser les boulons M3 de 25 mm et les écrous M3 pour fixer les moteurs sur le châssis (ceci est aussi l'étape 10 des branchements, alors cette étape est potentiellement déjà réalisée.) Il est plus facile de souder les fils sur un moteur qui n'est pas fixé au châssis. Il est donc suggéré d'accomplir cette étape après la soudure des fils du moteur (étape 9b des branchements).

- Après avoir fixé les moteurs au châssis, mettre les joints toriques (o-rings) faisant office de pneus sur les roues. Poser les roues à serre sur les moteurs. S'il y a un jeu, utiliser de la colle chaude. Si la roue est trop serrée sur le moyeu, utiliser une lime.
- S'assurer maintenant d'avoir complété les branchements du circuit de puissance du Qbot. Vous pouvez maintenant passer à la section Programmation de l'autoformation et accomplir l'initiation à Bitbloq, la mise en marche du Qbot et le défi 1. Pour la suite de la programmation, il faudra revenir à l'assemblage mécanique. Il est aussi tout à fait possible de compléter l'assemblage mécanique avant de poursuivre vers la programmation du Qbot.
- Fixer l’attache avant avec les boulons M3 de 20 mm et les écrous M3.

- Visser les interrupteurs d’arrêt sur l'attache avant avec une vis. Les deux interrupteurs vont dans des directions différentes (voir la visualisation). Connecter les interrupteurs d'arrêt au blindage en utilisant des fils Dupont femelle-femelle.
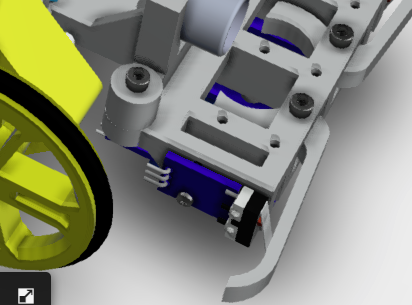
- Fixer les antennes sur l'attache avant avec un boulon M3 de 20 mm et un écrou M3. Vérifier que les antennes appuient correctement sur les interrupteurs. Vous pouvez maintenant réaliser le défi 2 et le défi 5A.
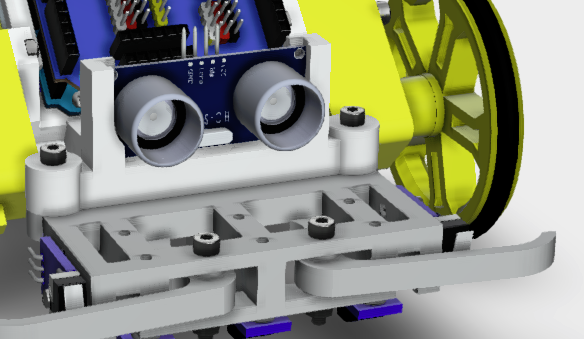
- Glisser le détecteur de distance à ultrason sur la glissière à l'avant du châssis. Connecter le détecteur à ultrason avec le blindage en utilisant des fils Dupont femelle-femelle. Vous pouvez maintenant réaliser le défi 3 et le défi 5B.
- Coller l'octocoupleur à l'arrière du Qbot afin que le disque-encodeur passe dans la fente du capteur (voir la visualisation). Connecter l'octocoupleur avec le blindage en utilisant des fils Dupont femelle-femelle. Vous pouvez maintenant réaliser le défi 4.
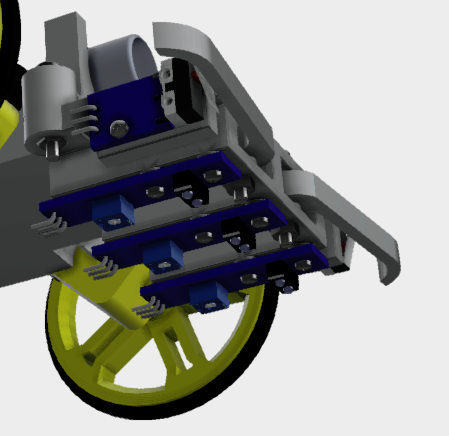
- Visser les trois capteurs infrarouges sous l’attache avant. Connecter les capteurs avec le blindage en utilisant des fils Dupont femelle-femelle. Vous pouvez maintenant réaliser le défi 6.
Avec les élèves
Il est assez efficace de faire certaines opérations (comme le taraudage et la fixation du disque-encodeur sur la roue arrière) en chaîne par des élèves spécialisés, typiquement des élèves qui ont moins de facilité avec la soudure. Il est également possible que chaque élève fabrique son propre Qbot, mais étant donné que la soudure est une portion demandant plus de minutie, il est important d'assurer une bonne supervision des élèves lors de ces étapes.
Lors de la fabrication du Qbot, nous avons priorisé les branchements électriques, mais s'il y a un bouchon à la station de soudure, il est possible d'avancer l'assemblage mécanique en parallèle.
La plupart des élèves n'ont pas complété l'assemblage mécanique (étapes 7 et plus) avant de se lancer dans la programmation. En avançant dans les défis, les capteurs nécessaires étaient connectés de façon ad hoc.