Défi 5 : Les capteurs et les contrôles
Thymio possède cinq capteurs en avant, deux capteurs en arrière et deux capteurs en dessous.
Les capteurs avant détectent les objets à une distance d’environ 10 cm, les capteurs arrière détectent les objets à une distance d’environ 7 cm et les capteurs en dessous détectent les objets à une distance d’environ 4 cm.
À l’aide de ses capteurs et des blocs contrôles, nous allons rendre Thymio davantage autonome dans ses déplacements.Défi 5a : Les capteurs pour nous avertir
Afin de vous initier au fonctionnement des capteurs, vous devez rédiger un programme qui demande à Thymio :
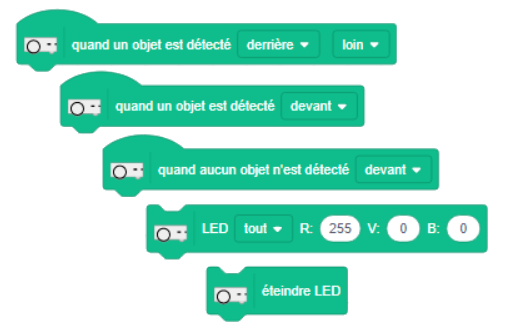
- d’allumer toutes ses lumières en rouge lorsqu’il aperçoit un objet devant lui;
- d’allumer toutes ses lumières en bleu lorsqu’il aperçoit un objet derrière lui;
- d'éteindre toutes les lumières lorsqu'il n'y a pas d'objet en avant ou en arrière de lui.
Avec VPL 3
Blocs à utiliser pour réaliser ce défi :
Si vous avez besoin d’aide pour réaliser le défi, vous pouvez regarder la vidéo suivante :
Durée : 1 min 27 s
Avec Scratch
Blocs à utiliser pour réaliser ce défi :
Si vous avez besoin d’aide pour réaliser le défi, vous pouvez regarder la vidéo suivante :
Durée : 2 min 09 s
Défi 5b : Déplacement autonome
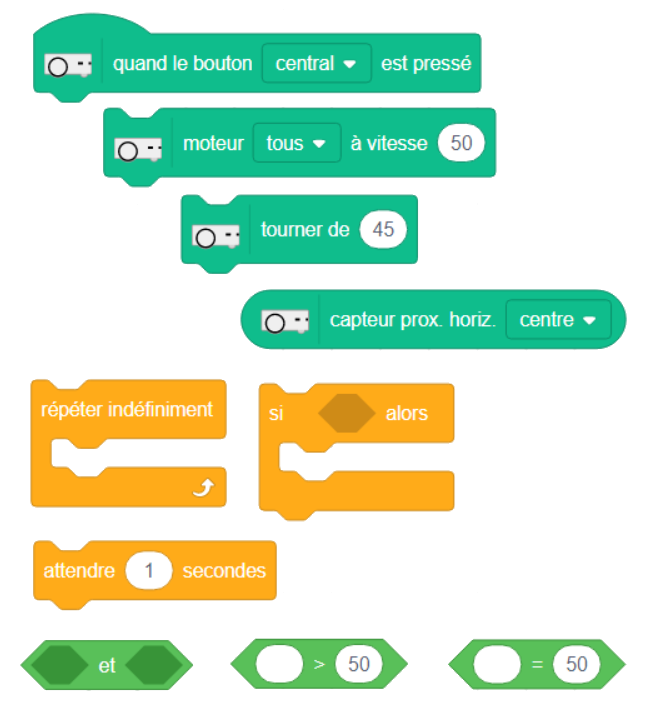
À l’aide de ses capteurs et des blocs contrôles, nous allons rendre Thymio davantage autonome dans ses déplacements. Vous devez programmer Thymio afin qu’il avance continuellement, mais nous voulons que Thymio tourne à gauche s’il rencontre un objet à sa droite et qu’il tourne à droite s’il rencontre un objet à sa gauche.
Avec VPL 3
Blocs à utiliser pour réaliser ce défi :
Si vous avez besoin d’aide pour réaliser le défi, vous pouvez regarder la vidéo suivante :
Durée : 1 min 15 s
Avec Scratch
Blocs à utiliser pour réaliser ce défi :
Si vous avez besoin d’aide pour réaliser le défi, vous pouvez regarder la vidéo suivante :
Durée :