Assistance

Défi 3 : Faire tourner son robot
Conditions d’achèvement
Consulter
Votre robot peut maintenant se déplacer en ligne droite sur une certaine distance, mais dans plusieurs défis vous devrez le faire changer de direction. Il faut donc le programmer pour le faire tourner. Essayer les degrés suivants : 45°, 90°, 180°.
Revoir cette vidéo à propos de la rotation
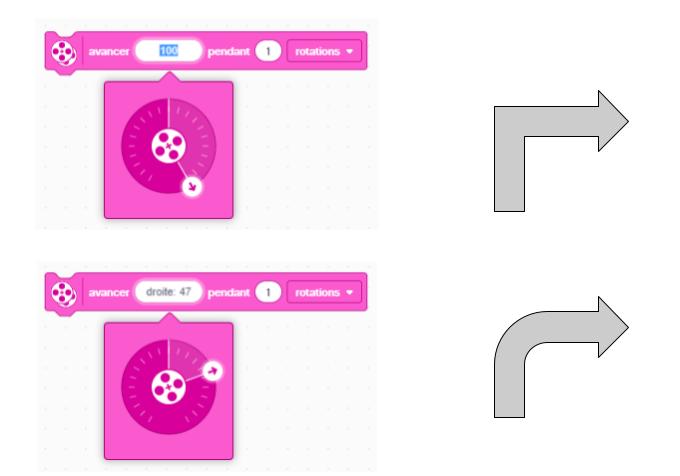
L’image ci-dessous explique comment contrôler les deux moteurs de votre robot pour changer de direction.
EV3 Classroom
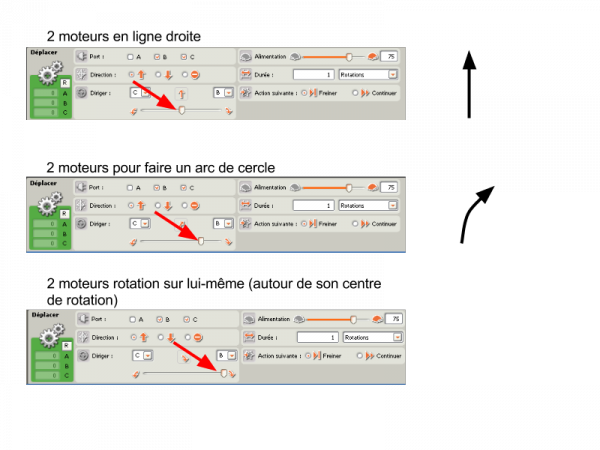
Pour NXT
Pour EV3 Mindstorm
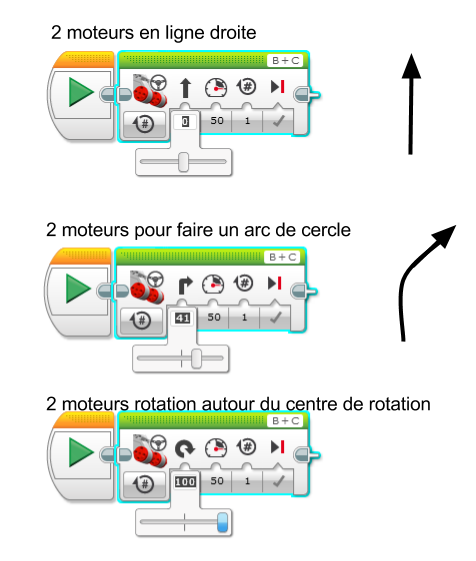
- Cas ligne droite : le curseur de «synchronisation» des moteurs est au centre, donc lorsque le moteur B fait 1 rotation dans un sens, le moteur C fait lui aussi 1 rotation dans le même sens.
- Cas arc de cercle : le curseur de synchronisation n’est pas centré ni à l’extrémité, donc lorsque le moteur B fait 1 rotation dans un sens, le moteur C ne fait qu’une partie de la rotation dans le même sens. Ce qui donne un arc de cercle de rayon plus ou moins grand.
- Cas rotation sur lui-même : le curseur de synchronisation est placé à une extrémité (gauche ou droite), donc lorsque le moteur B fait 1 rotation dans un sens, le moteur C fait une rotation dans le sens contraire. Ce qui résulte en un changement de direction sur lui même (autour de son centre de rotation, entre les 2 roues).
Garder en note la durée (la programmation) pour réaliser les degrés ci-haut.