4) Branchements électriques du circuit de puissance
Lorsque le châssis du Qbot est imprimé, il est possible d'assembler le « circuit de puissance » du robot. Ce circuit fournit la puissance électrique nécessaire à la rotation des moteurs du Qbot. Selon les instructions qui lui seront fournies lors de la programmation de la plaquette Arduino et les informations récoltées par les capteurs, ce circuit fournira plus ou moins de puissance à chaque moteur afin de faire avancer, reculer, tourner ou arrêter le Qbot.
La procédure de raccordements électriques qui suit permet d'assembler le circuit de puissance. Les vidéos accompagnant les étapes fournissent des précisions quant aux manipulations à faire et il est nécessaire de les écouter afin d'obtenir l'entièreté de l'information. Merci à Yvon Quemener pour la réalisation de ces vidéos.
Voir les pages d'annexe pour plus d'informations sur les techniques de soudure et les composantes du circuit de puissance et la vue d'ensemble des branchements du Qbot.
1. Souder des fils multibrins de calibre #22 d’une longueur approximative de 20 cm au module contrôleur de moteur en respectant le code de couleurs du schéma.
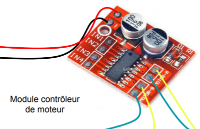
2a. Souder quatre broches Dupont aux entrées A1, A2, B1 et B2 du contrôleur de moteur (ou IN1, IN2, IN3, IN4 selon le modèle).
2b. Coller le module contrôleur de moteur sur le robot avec de la colle chaude (vérifier l’orientation). ATTENTION : il faut avoir taraudé le châssis avant de coller le contrôleur de moteur (voir étape 1 de l'assemblage mécanique).
3a. Souder des fils multibrins de calibre #22 d’une longueur approximative de 20 cm aux bornes Vin du module step up en respectant le code de couleurs du schéma.
3b. Placer un voltmètre aux bornes Vout du module step up. À l'aide d'un bloc d'alimentation de laboratoire, appliquer 4V aux bornes Vin. Ajuster la vis de réglage du module MT-3608 afin d’obtenir 9V sur le multimètre branché aux bornes Vout. (Note : l'ampoule utilisée dans la vidéo est optionnelle.)
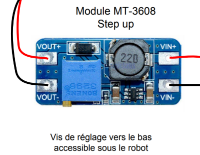
4a. Souder des fils multibrins de calibre #22 d’une longueur approximative de 20 cm aux bornes Vout du module step up en respectant le code de couleurs du schéma.
4b. Coller le module step up sur le robot, la vis de réglage accessible sous le robot.
5a. Identifier le positif du support à batterie à l’aide d’un autocollant rouge dans le fond du support à piles. Étamer les deux contacts du support à batterie. Installer l'interrupteur. Fixer le support à batterie au robot à l’aide de deux vis (positif du côté de l’interrupteur).
5b. Couper le fil multibrin de la borne Vin+ à une longueur convenable, puis le souder à une des bornes de l'interrupteur.
5c. Utiliser le segment de fil coupé pour souder l'autre borne de l'interrupteur à la borne positive du support à batterie.
5d. Ajuster la longueur du fil de la borne Vin- et le souder à la borne négative du support à batterie.
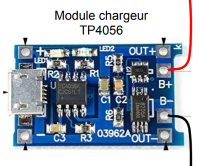
6a. Coller, à l’aide de colle chaude, le Chargeur TP4056 de manière à ce que la prise micro USB soit accessible.
6b. Positionner les câbles du Chargeur TP4056, couper les fils de la bonne longueur, dégainer et étamer.
6c. Souder les fils du module chargeur TP4056 aux contacts du support à batterie en prenant soin de respecter les polarités.
7. Relier les deux fils positifs et les deux fils négatifs (du module step up et du module contrôleur de moteur) au connecteur d’alimentation qui servira de prise pour la plaquette Arduino.
8a. Glisser la plaquette Arduino dans la rainure du châssis et la visser en place. Brancher le connecteur d'alimentation dans la plaquette Arduino. Insérer le blindage sur la plaquette Arduino.
8b. Souder deux fils Dupont 20cm M-F au condensateur 1F, 5.5V et isoler avec une gaine thermorétractable, puis relier selon le schéma. Attention aux polarités du condensateur!
9a. Positionner les câbles du contrôleur, couper les fils de la bonne longueur, dégainer et étamer.
9b. Souder les fils blanc et vert aux moteurs selon le schéma.
10. Fixer les moteurs à l’aide de boulons M3 de 25 mm et d'écrous m3.
11. Installer la batterie rechargeable et la charger en raccordant un chargeur USB. Attention à l'orientation de la pile! Une pile mal orientée causera un court-circuit et fera immédiatement brûler les composantes du circuit.
12. Tester le contrôleur de moteur à l’aide d’un fil Dupont relié à une broche V du blindage Arduino en le plaçant successivement en contact avec les broches d’entrée A1, A2, B1 et B2 du contrôleur de moteur (HIGH). Le circuit doit être sous tension. Vous devez vous référer à la table de vérité du contrôleur de moteur afin de confirmer le bon fonctionnement. Voir l'annexe pour plus d'informations.
13. Effectuer les raccordements du contrôleur de moteur et des capteurs avec les fils Dupont conformément au schéma. Les connexions du contrôleur de moteur vers les ports 4 à 7 du blindage doivent être identiques au schéma afin d'assurer le fonctionnement du Qbot. Les connexions des capteurs sur les autres ports sont à titre indicatif, c'est-à-dire que l'on peut changer le numéro sur lequel ils sont connectés, mais pas l'ordre des connexions G, V et S. Ne pas utiliser les ports 0 et 1. Voir l'assemblage mécanique pour plus d'informations sur la fixation des capteurs sur le Qbot.
Avec les élèves
Nous avons utilisé deux stratégies différentes pour la réalisation des étapes de fabrication. Pour un groupe relativement homogène, chaque élève s'occupait des branchements de son propre Qbot. Les élèves plus avancé.e.s devenaient éventuellement des élèves-ressources pour aider les élèves moins rapides ou pour effectuer des opérations demandant plus de minuties que certains élèves n'arrivent pas à accomplir. Par souci de différenciation pédagogique, certains élèves ne pouvant accomplir l'ensemble de la fabrication étaient assigné.e.s à d'autres tâches telles que le support à la conception en Onshape, l'aide à la programmation, l'impression 3D, certaines étapes de l'assemblage mécanique pouvant être faites en série, etc.
Pour un groupe très hétérogène, nous avons plutôt opté pour une approche de fabrication en série. Chaque élève, ou regroupement d'élèves, était associé à une tâche précise selon leurs capacités. Par exemple, les élèves les plus aptes à la soudure s'occupaient de souder les fils sur les contrôleurs de moteur, tandis qu'un autre groupe s'affairait à souder les fils sur le module step up et à les ajuster.
Les élèves travaillent sur des bancs de soudure ou sur des tables de travail selon l'étape à accomplir. Des ordinateurs, ailleurs dans le local, leur permettent de suivre les étapes de fabrication. Le matériel est placé sur une table, classé dans des bacs. Les élèves doivent y faire valider une étape de fabrication afin d'obtenir le matériel nécessaire à la prochaine étape.
Le nombre de soudures est important et les composantes électroniques sont fragiles. Nous avions faits d'autres projets de soudure plus tôt dans l'année scolaire afin de préparer les élèves aux soudures nécessaires au Qbot.
Progression de la fabrication
Vous pouvez maintenant passer à l'assemblage mécanique du Qbot. Comme seul le châssis était nécessaire au raccordement du circuit de puissance, assurez-vous d'avoir au moins la roue arrière et le disque-encodeur imprimés ainsi que d'avoir complété la conception et l'impression 3D des roues avant.